





Фиаско автопилота: почему Tesla попала в смертельное ДТП

ДТП со смертельным исходом показало ограниченность автопилота производства компании Tesla, который своевременно не определил как препятствие поворачивающий грузовой автомобиль. Специалисты CHIP расскажут, почему это произошло.


Автопилот Tesla не делает модель S автономным автомобилем. Однако сообщение об аварии, приведшей к гибели Джошуа Брауна — водителя Tesla, поразило всех, кто видел калифорнийскую компанию далеко впереди в гонке за полностью автономным транспортным средством: автомобиль не среагировал на грузовик, когда Браун воспользовался правом преимущественного движения, и без торможения врезался в полуприцеп. Для понимания того, почему может произойти подобная авария, необходимо подробно разъяснить ход событий и разобраться в сенсорных технологиях, которые использует компания Tesla и другие автопроизводители.
 Состояние сенсорных технологий
Состояние сенсорных технологий
 Важнейшие инструменты распознавания автомобилей и препятствий — видеокамеры и ультразвуковые датчики, установленные в Tesla и других автомобилях класса «люкс», обладают дальностью действия в пределах нескольких метров и поэтому применяются при скоростях движения на магистралях только для распознавания автомобилей в соседних полосах движения.
Важнейшие инструменты распознавания автомобилей и препятствий — видеокамеры и ультразвуковые датчики, установленные в Tesla и других автомобилях класса «люкс», обладают дальностью действия в пределах нескольких метров и поэтому применяются при скоростях движения на магистралях только для распознавания автомобилей в соседних полосах движения.
Система стереокамер в классе «люкс» определяет расстояние до объектов точно так же, как человеческий мозг, путем сравнения слегка отличающихся перспектив, наблюдаемых левым и правым глазом. Камера в Tesla, однако, работает только с применением оптической системы: то есть, информация о расстоянии может быть получена лишь с помощью методов обработки изображений и путем сравнения нескольких последовательных изображений, что занимает много времени.
Камеры обладают теми же недостатками, что и глаза: они могут быть ослеплены, для их работы может быть слишком темно, для обнаружения объекта им требуется значительный контраст, они не видят сквозь туман, и их разрешение ограничено. Дополнение системы датчиков сигналами радара обещает устранить все эти проблемы, вплоть до их полного разрешения. Радар же может распознавать объекты практически при любых условиях, при которых может двигаться автомобиль.
Радарные датчики должны надежно отличать движущиеся (и тем самым — потенциально опасные) объекты от, например, ограждений, эстакад и т. д., и не должны постоянно вызывать ложные тревоги и аварийные торможения. Они определяют препятствия с помощью эффекта Доплера — или точнее, с помощью особого смещения фазы отражаемого сигнала радара — относительных скоростей объектов в поле зрения системы. Преимуществом допплеровского измерения является то, что уже единственное «изображение» позволяет сделать вывод о том, быстро ли приближается транспортное средство или нет.
«Холостые выстрелы» в отношении неподвижных препятствий
Допплеровское измерение не делает разницы между неподвижным транспортным средством и ограждением. Объем вычислений для определения на экране радара потенциально опасных неподвижных или перемещающихся перпендикулярно направлению движения автомобилей — огромен. Только последнее поколение радарных датчиков позволяет получить подробную информацию о стационарных объектах: например, проезжей части и растительности на обочине.Однако для современных серийных автомобилей неподвижные или движущиеся в поперечном направлении объекты все еще представляют собой большую проблему. В то время как Audi, BMW и Daimler регистрируют объекты, движущиеся со скоростью свыше 200 км/ч, и, например, настраивают адаптивную систему круиз-контроля на эти значения, неподвижные объекты более-менее надежно определяются при скорости от 70 (Daimler) до 85 км/ч (Audi и BMW), а именно — с помощью оптической камеры.
Tesla решает эту задачу с помощью собственного программного обеспечения.
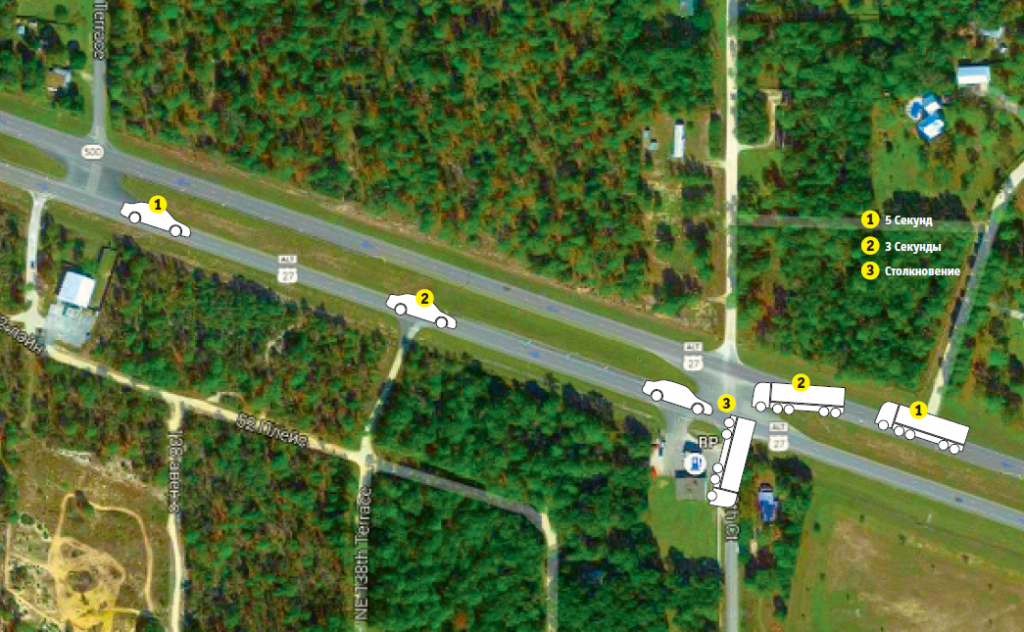
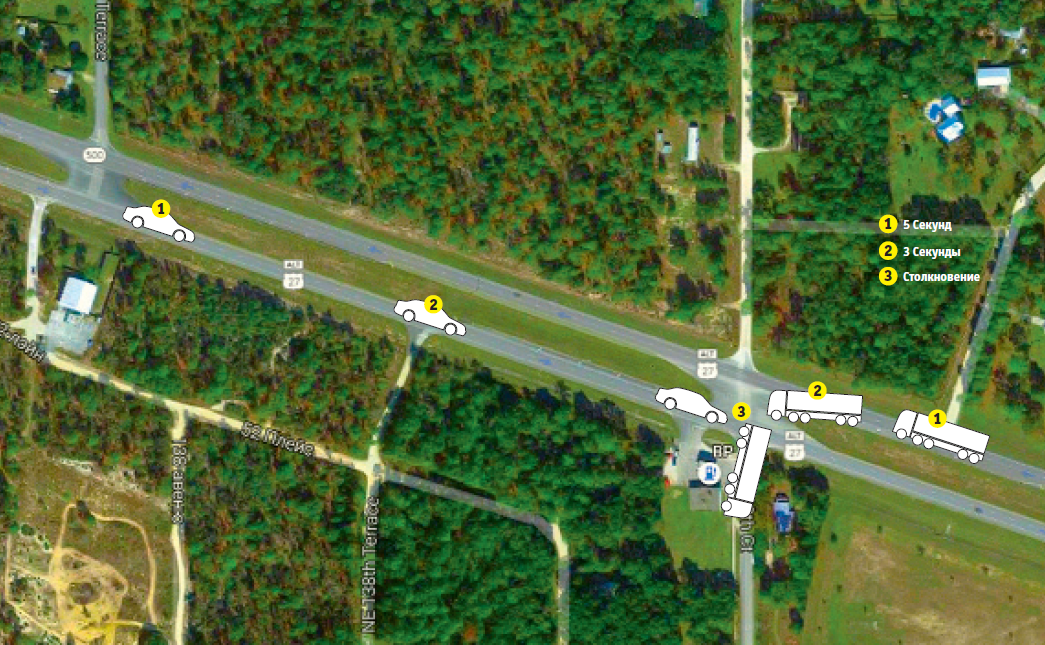
Однако в аварии, в которой погиб Джошуа Браун, был еще один дополнительный фактор, который затруднил оценку ситуации водителем и автопилотом: шоссе US 27 является прямым, однако проходит не по равнине; перекресток, на котором произошла авария, находится в ложбине. Изображения службы Google Streetview указывают на проблему видимости, состоящую в нечеткости: камера службы просмотра изображений улиц расположена примерно на два метра выше камеры автомобиля, глаза водителя находятся на высоте около одного метра над землей, радарный датчик — на высоте примерно 40 см.
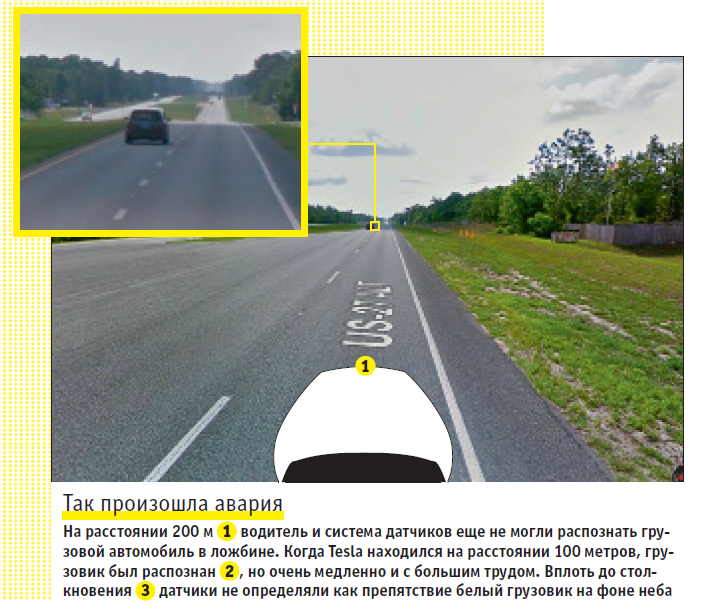
Когда Джошуа Браун подъезжал к перекрестку, грузовик стал полностью различим системой датчиков Tesla на расстоянии всего 100 метров. Из-за того, что условия дневного освещения обеспечивали лишь малый контраст между белым грузовиком и облаками на небе, а также вследствие медленного движения грузовика перед поворотом, малое время до столкновения (при скорости 120 км/ч — 3 секунды) для системы датчиков было недостаточным для правильного определения опасности. Однозначно опасное, однако трудно поддающееся анализу движение в поперечном направлении могло начаться всего за две секунды до аварии.

Лучше ли другие машины?
Производители автомобилей премиум-класса Audi, BMW и Daimler в унисон отвечают, что их системы помощи водителю не рассчитаны для предотвращения подобных аварий на скоростных автомагистралях. ДТП со смертельным исходом водителя автомобиля S-класса, который 29 февраля столкнулся с грузовиком на полосе разгона трассы A7, подтверждает это.
Все три производителя подчеркивают, что их системы помощи могут действовать только в качестве вспомогательных. И только с применением третьей технологии датчиков (например, лазерный сканер в дополнение к радарному и видеодатчику) в перспективе даст возможность временно передавать электронике контроль над автомобилем. Водителям автомобилей с «автопилотами» должно быть ясно, что им еще несколько лет придется оставаться крайне внимательными за рулем.
ФОТО: компании-производители; Google Maps; Google; Bosch; Audi (AG)









 Читайте нас в социальных сетях
Читайте нас в социальных сетях